Как студенты ИППТ работали над своими проектами с применением аддитивных технологий?
.jpg "Как студенты ИППТ работали над своими проектами с применением аддитивных технологий?")
Перед сессией и каникулами студенты магистерской программы «Компьютерный инжиниринг и цифровое производство» ИППТ прошли практический одноименный курс с активным применением аддитивных технологий. Мы решили рассказать вам о проектах и трудностях, с которыми столкнулись студенты.
«Задача курса - дать студентам ИППТ практический опыт создания прототипа: от идеи до работающего образца. Поскольку часто отмечают, что молодые инженеры умеют проектировать и проводить расчеты, но не представляют, как реальные гайки и болты накручиваются друг на друга. Например, делают отверстие на условные 10 мм для вала, который в диаметре тоже 10 мм. При этом они забывают, что у того же вала есть допуск и, если не учитывать это, то вал туда не пройдет просто», - отметил преподаватель курса Евгений Белослудцев
Отрицательная жесткость
Состав команды: Тарасенко Федор, Филькин Владимир, Скрипко Андрей, Осипова Анна, Колесова Светлана
Наш проект имел две цели и соответственно два результата. Первая, она же научно-исследовательская - анализ и исследование поведения структуры с эффектом "отрицательной жесткости". Позже мы попытались применить свойства такой структуры для решения практической задачи.
И вторая цель - продуктовая. Здесь было важно само проектирование энергопоглощающего контейнера на основе исследуемой структуры (в первую очередь, плоского слоя этого контейнера).
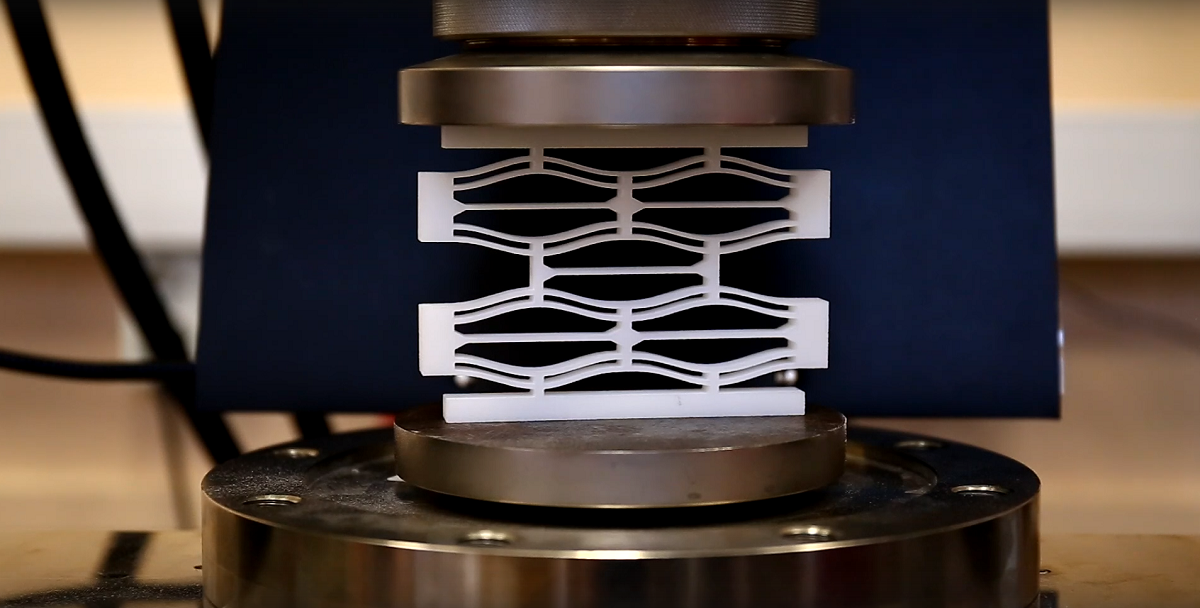
Самая интересная часть работы заключалась в прохождении полной цепочки проектного цикла (анализ статей, проектирование, КЭ-расчеты, снова проектирование, лабораторные испытания, изготовление и натурные испытания). Тем не менее, мы сталкивались с проблемами практически на каждом этапе. Хотя они больше напоминали рабочие моменты в целом. Их решение и делало проект живым. У нас не было универсальных ответов, потому что мы не работали по методичкам.
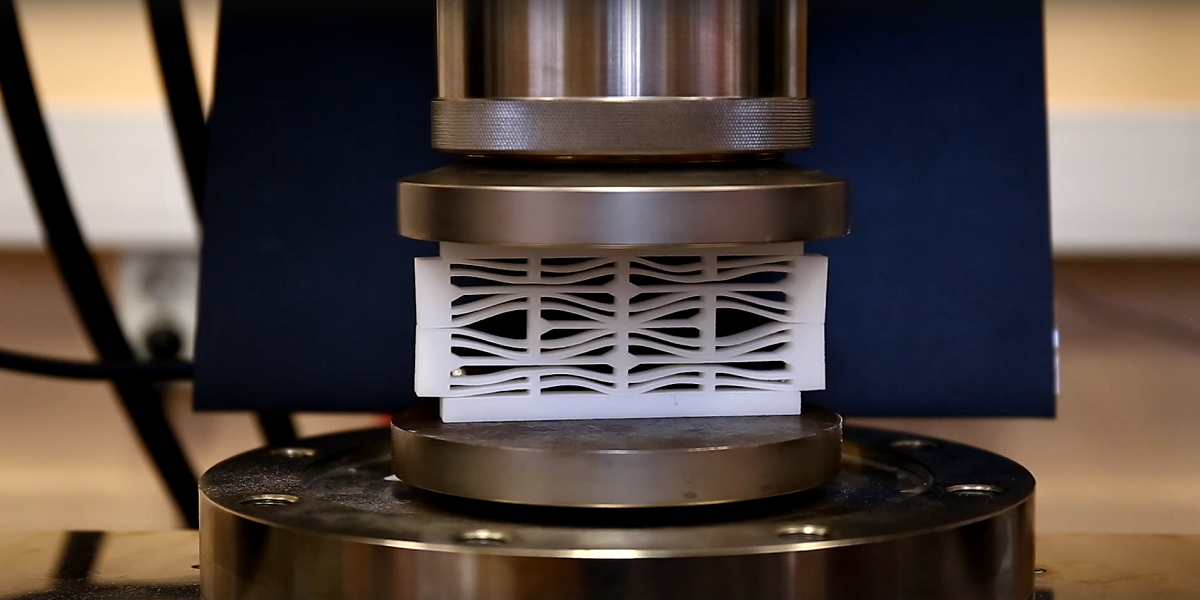
Если говорить о перспективах использования такой структуры, то они довольно существенны. Хорошие энергопоглощающие свойства могут быть использованы в разных областях промышленности, например, в автопроме (в том же бампере автомобиля). По нашей же изначальной задумке проект может стать основой для энергопоглощающих контейнеров, используемых для сброса ценных грузов в труднодоступные места.
Робо-рука
Состав команды: Нелюбин Евгений, Шунькин Иван, Машин Артем, Попов Евгений, Цыганцева Юлия
Для нашего проекта необходимо было собрать робота (все детали и компоненты поставлялись отдельно), научиться писать для него управляющие программы и провести реверс-инжиниринг (прим. - обратную разработку) всех деталей, чтобы оптимизировать элементы конструкции. Также перед нами стояла задача спроектировать и напечатать на 3D-принтере “хватающее” устройство для робо-руки.
Большая часть команды никогда не работала с робототехникой, электроникой и программированием, поэтому нам приходилось учиться и разбираться в этом в довольно сжатые сроки. Кроме того, мы закрепили навыки владения CAD-программами и печатью на 3D-принтере.
Дольше всего мы работали именно с программной начинкой. Из-за интеграции работа с проектом по машинному зрению у нас постоянно возникали ошибки в коде, но, к счастью, проект удалось закончить в полной мере.
Сейчас у проекта есть одно существенное ограничение - маленькая грузоподъемность, порядка 1,1 кг. Поэтому разумнее было бы использовать его, например, в приборостроении в качестве сборщика и сортировщика электронных компонентов.
Как мне кажется, сам курс больше решает разные образовательные задачи. Поэтому и работу с робо-рукой можно внедрить в процесс обучения для освоения основ робототехники.
Машинное зрение
Состав команды: Кузнецов Игорь, Привезенцев Михаил, Иванов Николай
В нашем проекте мы написали программу, которая способна распознавать контуры и координаты предметов через веб-камеру распознавать. Главная сложность заключалась в том, что нужно было не только освоить библиотеки машинного зрения, но и подобрать оптимальные параметры распознавания. Кроме того, во время реализации проекта мы столкнулись и с одной хитрой практической задачей. Дело в том, что нам пришлось дополнительно подбирать параметры для работы алгоритма при разных условиях освещённости.
И хотя изначально проект создавался как дочерний для работы с робо-рукой, но у него может быть и много других применений. Хотя сейчас он заточен именно под создание производственных линий.
Дрон-борщевик
Состав команды: Боглов Иван, Филькин Владимир, Лукинский Евгений, Шабельников Илья
Целью нашего проекта было создание беспилотного летательного аппарата для борьбы с сорняками, в частности борщевиком. В теории такой беспилотник может применяться на любой местности для внесения и пестицидов и удобрений
Во время работы над проектом мы прошли несколько трудоемких этапов: проектирование конструкции, сборка рамы, пайка деталей, детальный разбор системы управления полетом, проектирование системы полива. Думаю, что наиболее сложной задачей стало внесение в автоматическом режиме пестицидов против сорняков при минимальном вовлечении человека (только для дозаправки).
Экзоскелет
Состав команды: Гузиян-Дилбер Матия, Ли Исюань, Фан Юань, Жумагалиев Иса
Наш проект был посвящен разработке экзоскелета руки. Экзоскелет в теории можно использовать как вспомогательный механизм помощи на местах, где люди часто работают с “поднятыми” выше головы руками. Мы рассчитываем, что такое решение может помочь уменьшить нагрузку на плечевой пояс рабочих и избавить их от ненужной боли.
Во время работы над проектом нам было сложно сразу включиться в полноценную работу. Можно сказать, что мы страдали от недостатка энтузиазма. Но по мере прохождения курса мы все больше понимали, как следует управлять проектом и работой команды. Наши преподаватели всегда мотивировали нас и были рады прийти на помощь.

